


技术详细介绍
本项目涉及一种仿真人机械手
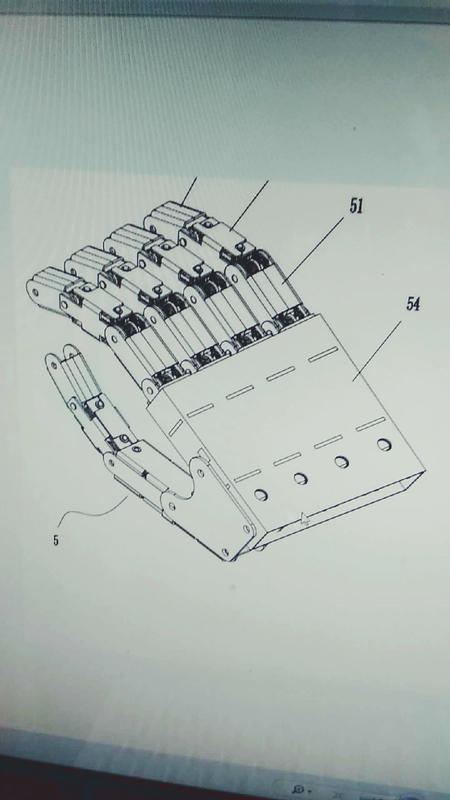
项目简介:本仿真人机械手设计目前市面上没有,由一电机带动一手指弯曲和伸直运动,由3根链条和3组齿轮组合成传动机构,完成运动传动,自锁能力强,通过传动比增大抓力,解决目前市面上无动力即松动,以及指尖承受力小问题,五手指五电机,电机置于每个手指后端,融于手架内。(所示之图为专利申请所用,真正达到五指合拢叉开,还需增加两电机)
项目核心创新点:采用链条传动(全球市场无此结构产品),目前市面的抓力小,我通过传动比,增大抓力;在无动力状态下易松动,我通过齿轮和丝杆自锁,在无动力状态下无松动,除非破坏其结构。 发明和实用两申请。 项目详细用途:目前最好的市场应用在医疗义肢方面最好,将来智能科技发展,其用途更广。
预期效益说明:目前市面的义肢卖价很高,几万—几十万不等,我计算我的仿真人机械手设计制造成本(包括电器),在1。2万以内。
项目简介:本仿真人机械手设计目前市面上没有,由一电机带动一手指弯曲和伸直运动,由3根链条和3组齿轮组合成传动机构,完成运动传动,自锁能力强,通过传动比增大抓力,解决目前市面上无动力即松动,以及指尖承受力小问题,五手指五电机,电机置于每个手指后端,融于手架内。(所示之图为专利申请所用,真正达到五指合拢叉开,还需增加两电机)
项目核心创新点:采用链条传动(全球市场无此结构产品),目前市面的抓力小,我通过传动比,增大抓力;在无动力状态下易松动,我通过齿轮和丝杆自锁,在无动力状态下无松动,除非破坏其结构。 发明和实用两申请。 项目详细用途:目前最好的市场应用在医疗义肢方面最好,将来智能科技发展,其用途更广。
预期效益说明:目前市面的义肢卖价很高,几万—几十万不等,我计算我的仿真人机械手设计制造成本(包括电器),在1。2万以内。