

技术详细介绍
一、综合情况
远程智能遥控水下机器人(ROV)获得“江苏省产学研联合创新资金——前瞻性联合研究项目”支持,通过开展ROV的总体设计与制造技术研究,形成一批具有自主知识产权的设计理论与设计方法,研制出能够在复杂环境中进行水下作业任务的ROV原理样机。
二、应用领域
可以用于江河水库大坝、水库溢洪道、桥梁水下基础、港口码头水下部分、船体或船底、海洋平台的勘察与清污;海底巡视、军用、反恐作业;水下抢险、水下救援;水下考古;海洋科学研究、海洋资源调查和作业;高校科研与教学;配合潜水员潜水作业;水产养殖等。
三、技术指标
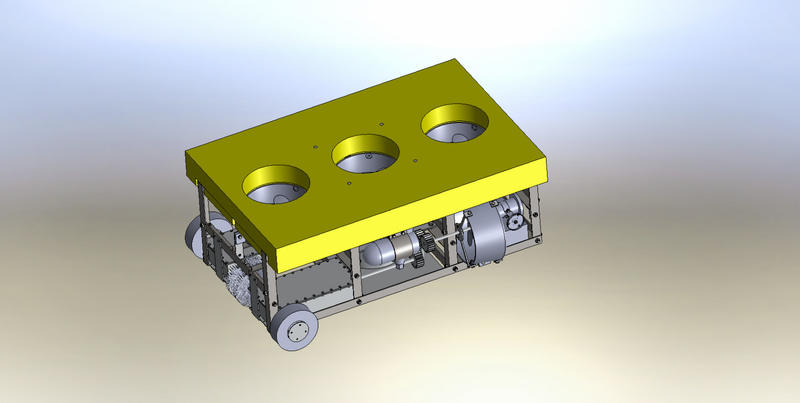
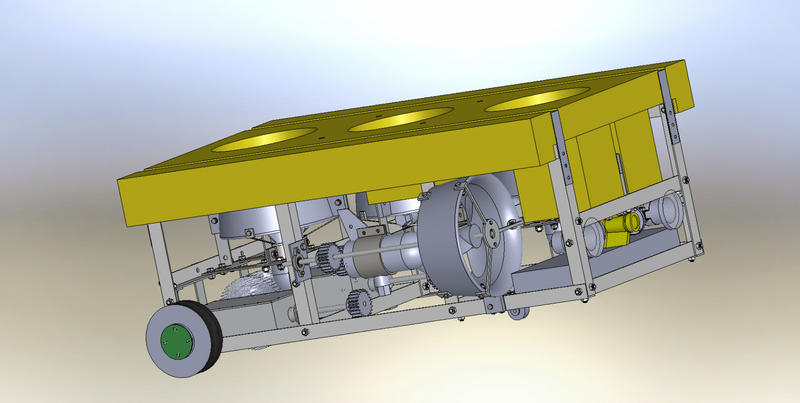
①结构形式:开架式;
②设计尺寸:;
③工作水深:200米以内;
④推进器:导管螺旋桨;
⑤空气中净重:小于80kg。
四、创新要点
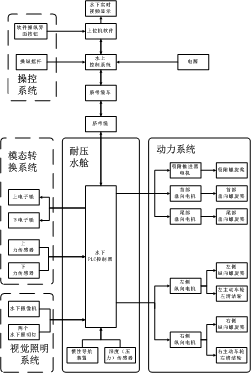
①建立复杂环境中ROV多体耦合系统稳态和动态运动数学建模,深入分析运动响应特性,完成ROV智能操控系统设计;
②研制出ROV原理样机,开发出可用于海洋结构物检测、海底探测等作业任务的新型智能ROV系统。
五、推广前景
海洋工程产业作为我国“十二五”的重点新兴产业之一,ROV的设计与开发对于提升我国海洋工程产业技术的原始创新能力,跻身国际先进的海洋工程装备设计制造领域具有重要的意义。